Valentino Ivan Wilson
Creepy Crawler
Project Description:
This group project tasked us with creating a walking mechanism that integrated with a moving mechanical sculpture (automaton). The project was divided into two parts: the automaton and the automaton-walker integration. The first part of the project consisted of using design thinking to synthesize a hand-cranked automaton toy that would either imitate the motion of living things, tell stories or interact with its environment. The second part of the project consisted of integrating our automaton with a motor-driven walking robot that was thematically linked. The goal was to create a fully functional walker system that would carry and operate the automaton while racing the other groups’ walkers at the end of the semester. My group consisted of four students and my role in the project, aside from normal group member tasks, was creating the Position-Velocity-Acceleration (PVA) analysis and Dynamic Force Analysis of the leg mechanism in MATLAB. I also split the CAD design work, GD&T engineering drawings, and final assembly of the walker with a group member. All CAD was completed in PTC Creo.
Design Procedure:
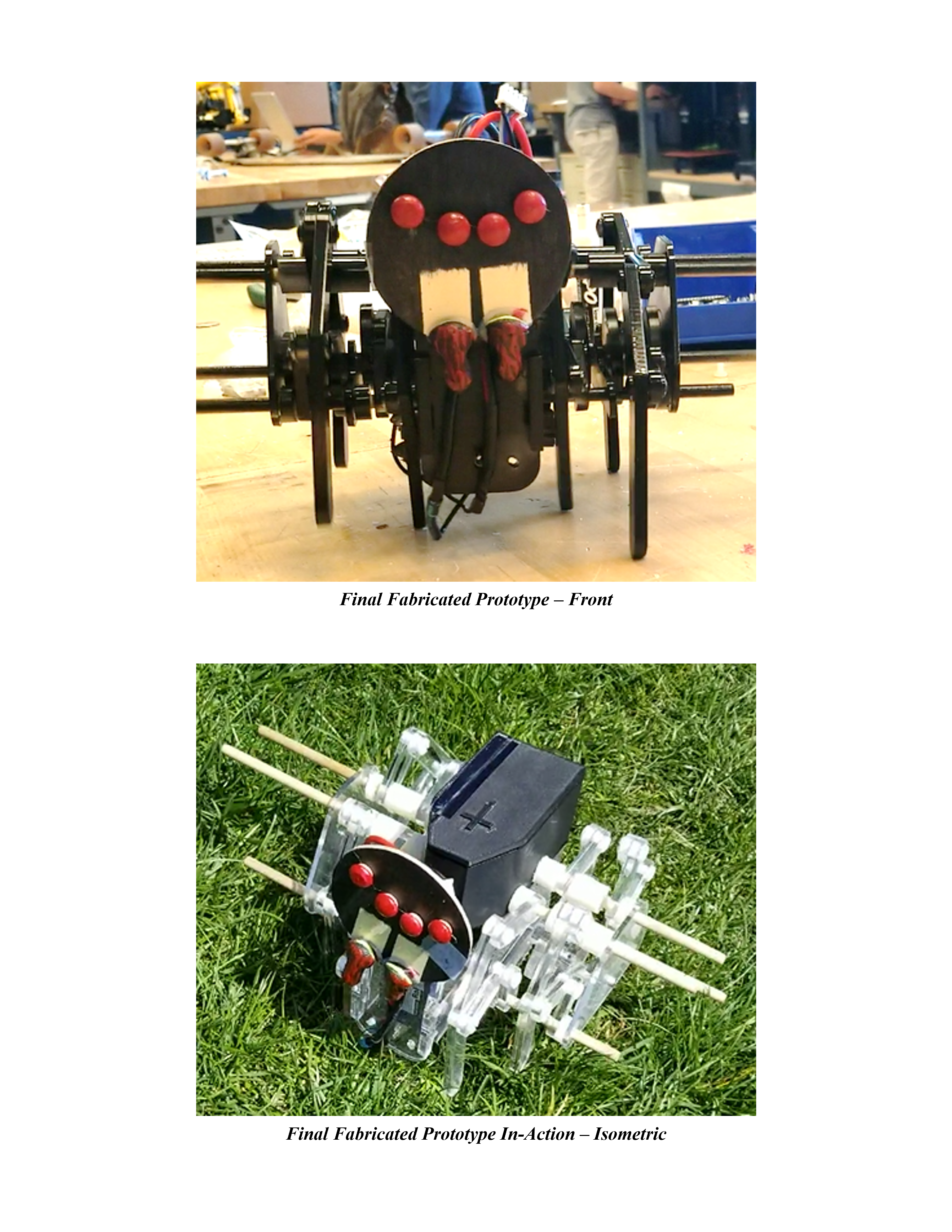
Our design process for the automaton toy began by conducting need-finding procedures through interviewing students on the main quad of the University of Illinois. We found that many people thought our automaton should serve as motivation to pursue a Mechanical Engineering Degree in college. After compiling our need-finding results, we chose our intended user group and wrote a Point-of-View (POV) statement. Our intended user group was determined to be high school students and more specifically those that are interested in exploring STEM-related fields in college. Our POV statement was: “High school upperclassmen need a way to understand and relate to the automaton. To fit these needs, the automaton needs to be complex enough to hold their interest but simple enough for them to discuss and interact with”. Our ideation stage was conducted through the usage of the ‘Post-it’ method and we then fabricated a low fidelity prototype of our hand-cranked automata to be displayed at the Engineering Open House. Brainstorming for our walker-automaton integration design began with creating hand sketches and evaluating them using Pugh Convergence Matrices. From those sketches, we chose a final design to pursue and then created a full CAD working assembly. The CAD assembly of the walker included all components and mechanisms for driving the automaton toy. We then performed a PVA analysis of the leg mechanism chosen for our walker in MATLAB in order to analyze the walker’s leg motion and gait. Lastly, the final walker was prototyped, fabricated, and assembled. A BOM was created to document all purchased parts and to ensure our $110 budget was not surpassed. The progress of the project throughout the semester was recorded through the usage of a GANTT chart.
Design Description:
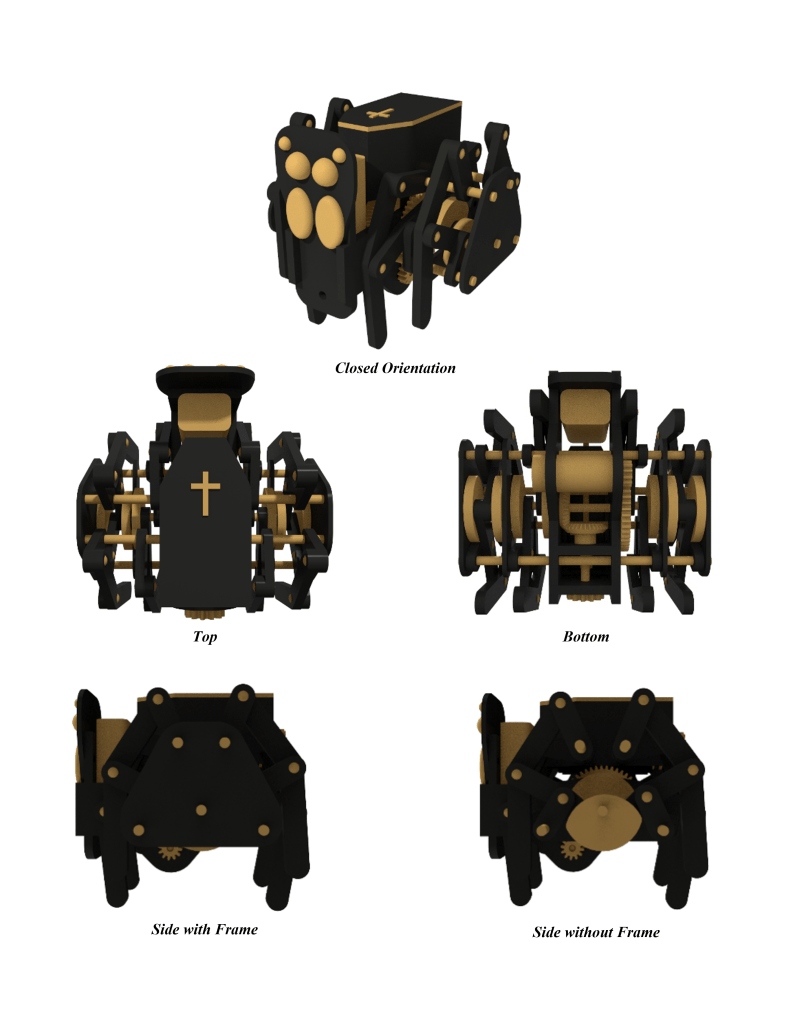
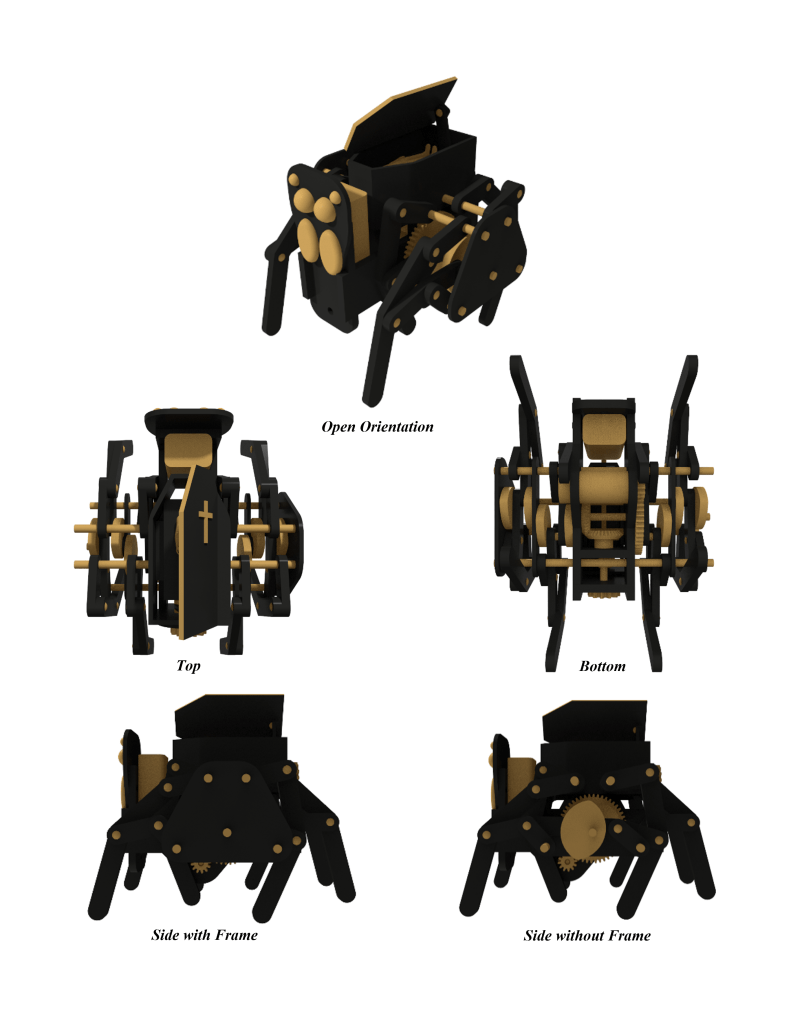
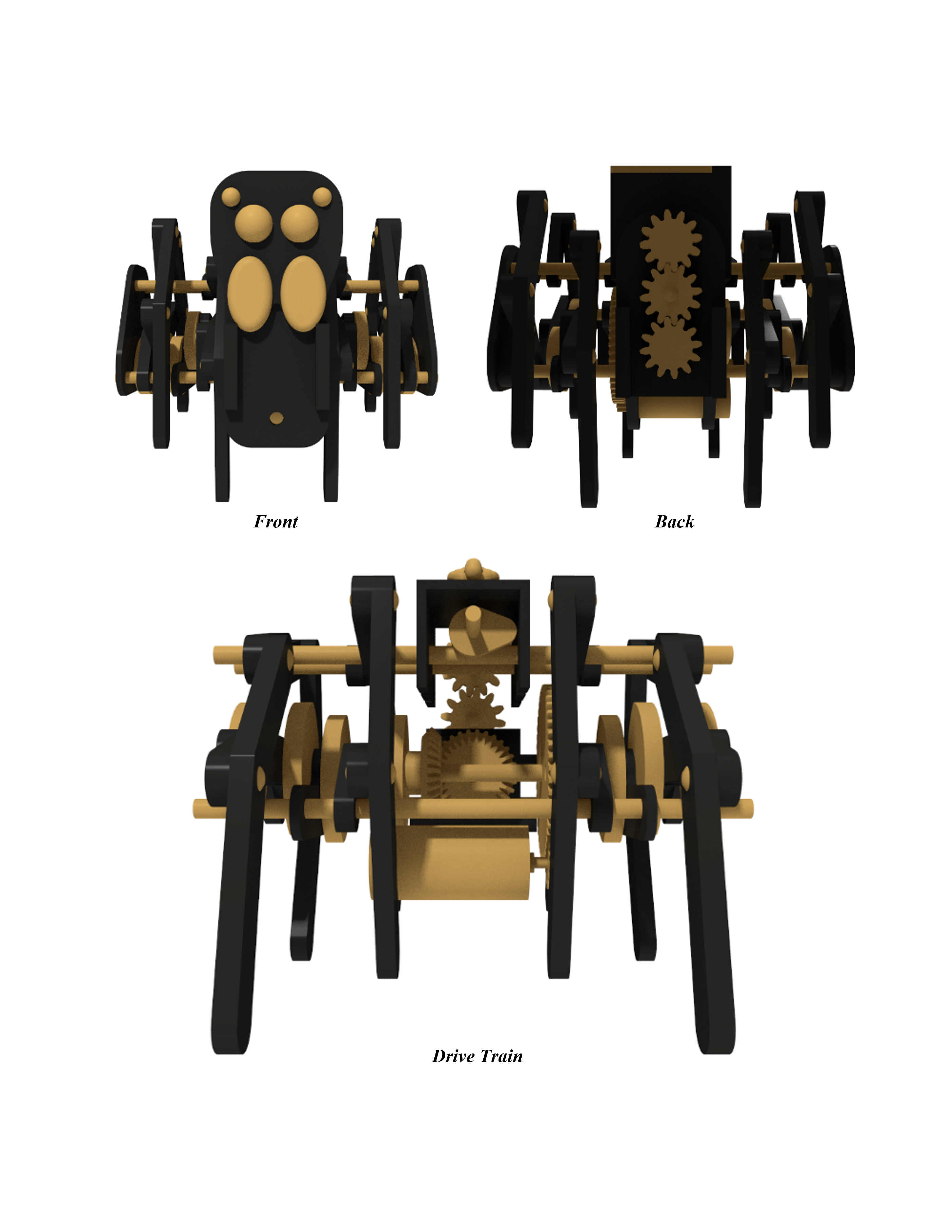
Our automaton-walker design was Halloween-themed and consisted of a coffin automaton with a spider walker. The automaton coffin was designed to be able to open and close with every step of the walker thus showing a man within the coffin floating up and down. The walker consisted of a single motor that actuated three separate movements within the walker: the walking (performed by 4 pairs of legs with a Klann linkage design emulating a spider gait), the opening and closing of the coffin door (performed by a simple three-bar linkage), and the elevating of the platform within the coffin (performed by a cam-follower mechanism). The motor was connected to a large gear, which then connected to a crankshaft that allowed adjacent legs to remain 180-degrees out of phase to allow for less side-to-side movement during walking. Our design also contained many structural components that ensured our walker would function properly. A rectangular frame was designed to hold the coffin in place as well as provide housing for the motor, battery, and battery switch. A small hole was cut in the front of the frame to which the battery switch would protrude and sit at an easily accessible location. Another structural component was the trapezoidal frame pieces on the outside edges of the walker. Those pieces, along with the nylon spacers, kept the legs in a single plane and prevented them from twisting or creating additional unwanted torques.

University:
University of Illinois at Urbana-Champaign
Program:
B.S. in Mechanical Science and Engineering
Course:
ME 370: Mechanical Design I
Experience Level:
Junior Year
Project Duration:
4 Months

Valentino Ivan Wilson
Chicago, IL
