Valentino Ivan Wilson
Osseointegrated, Artificial Tendon-Driven Prosthesis
Project Description:
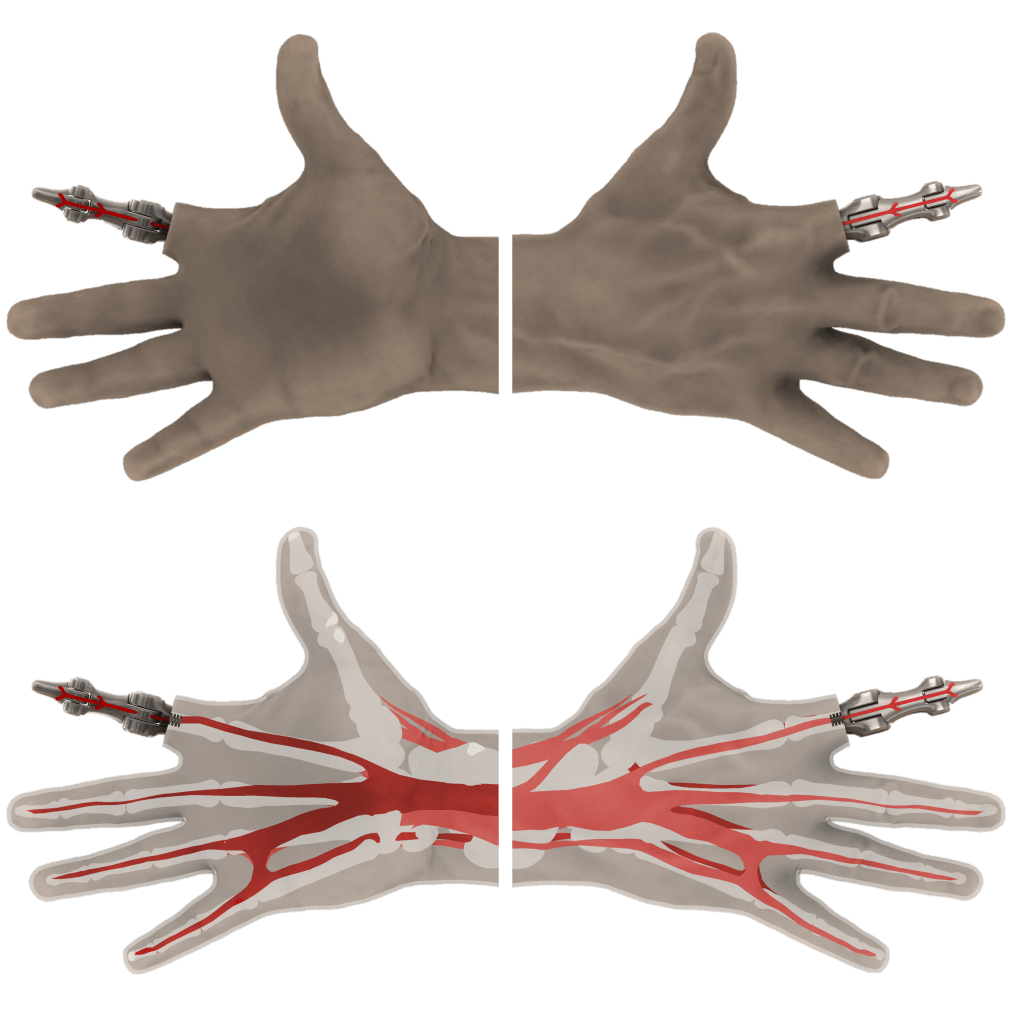
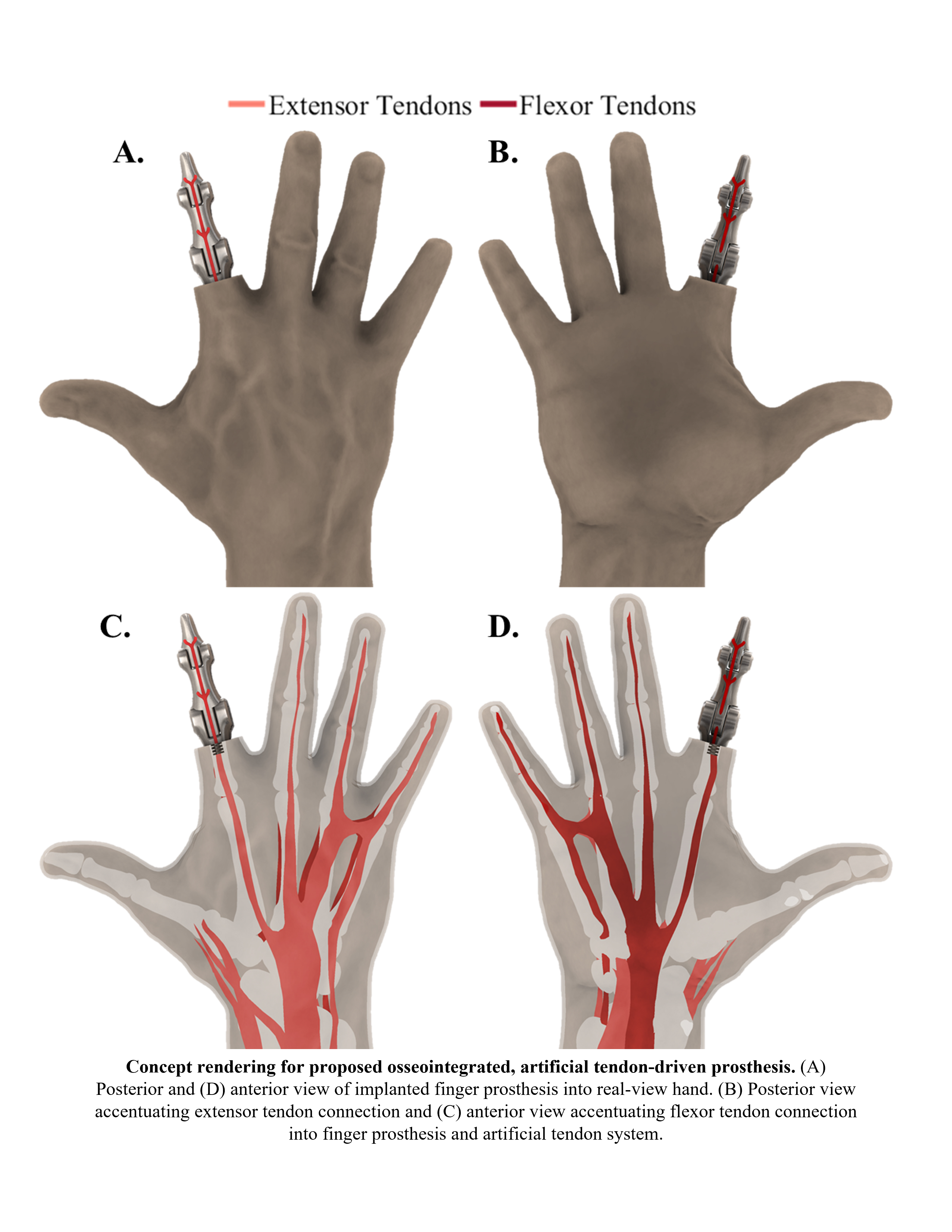
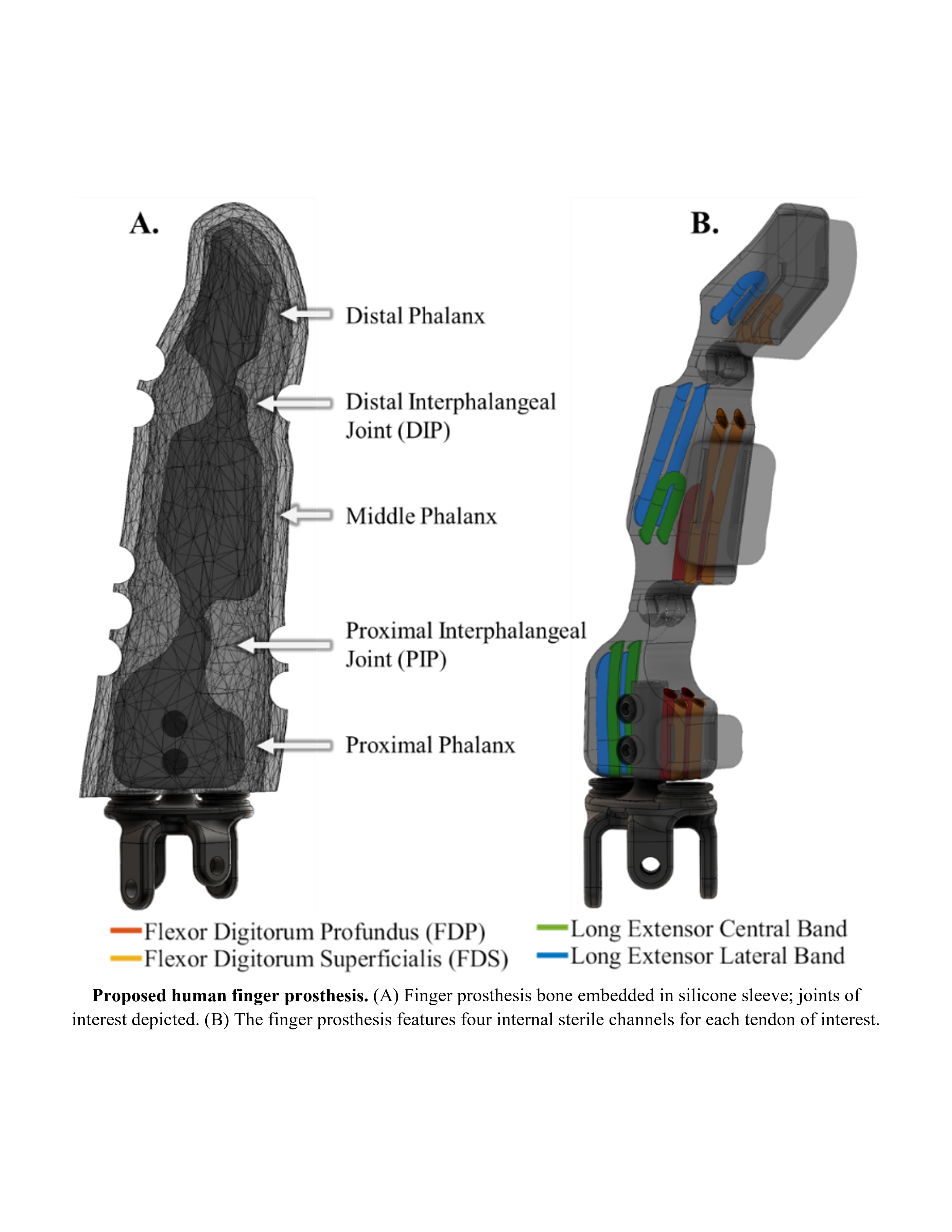
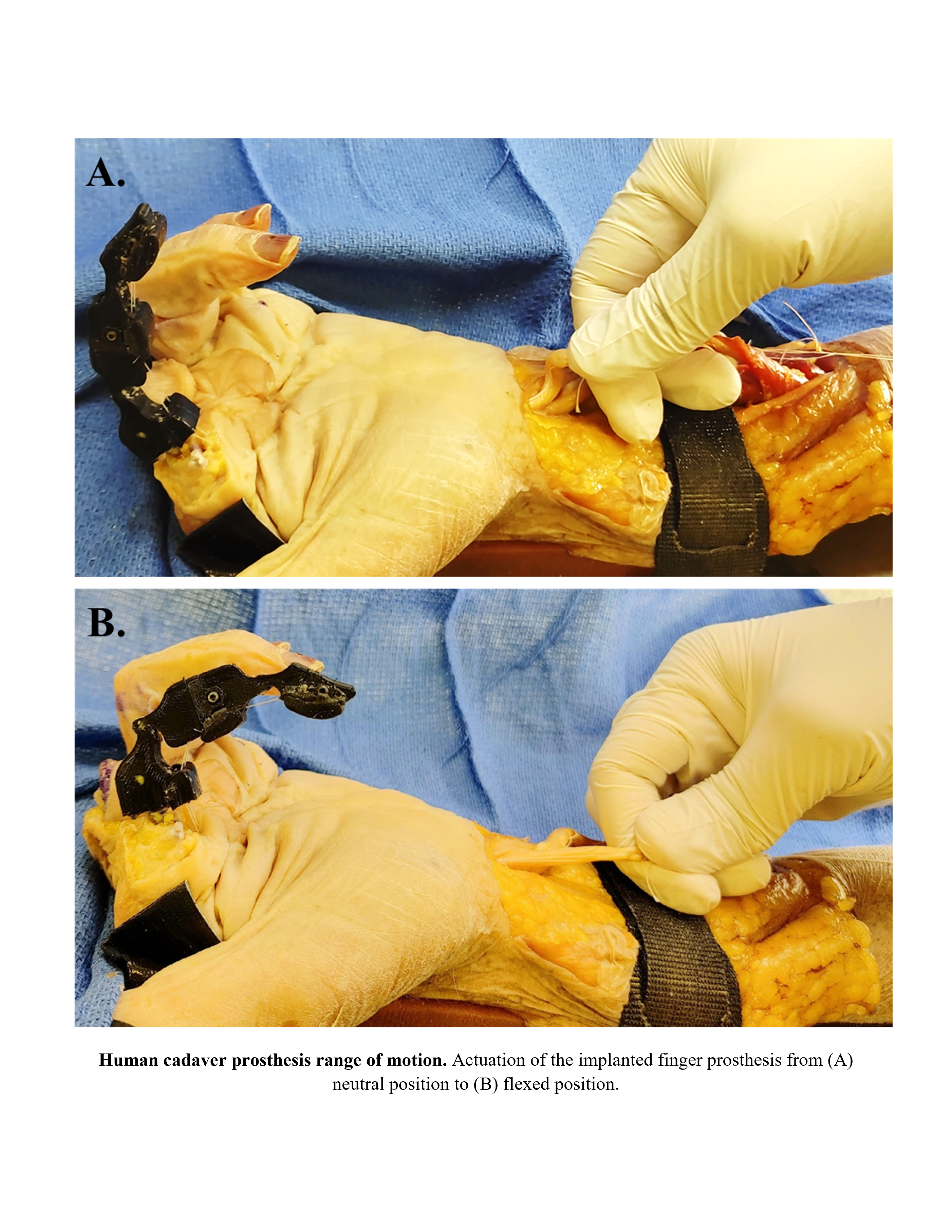
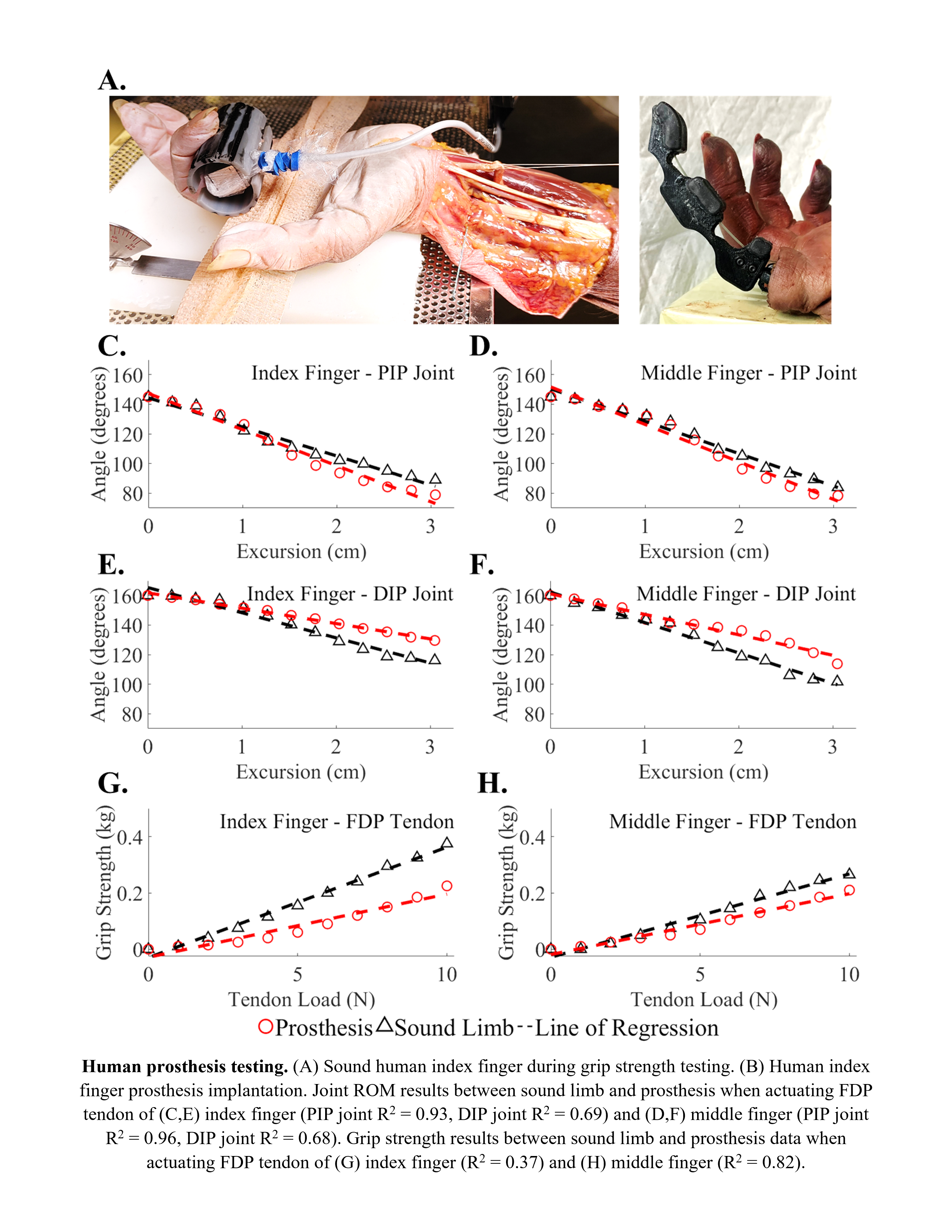
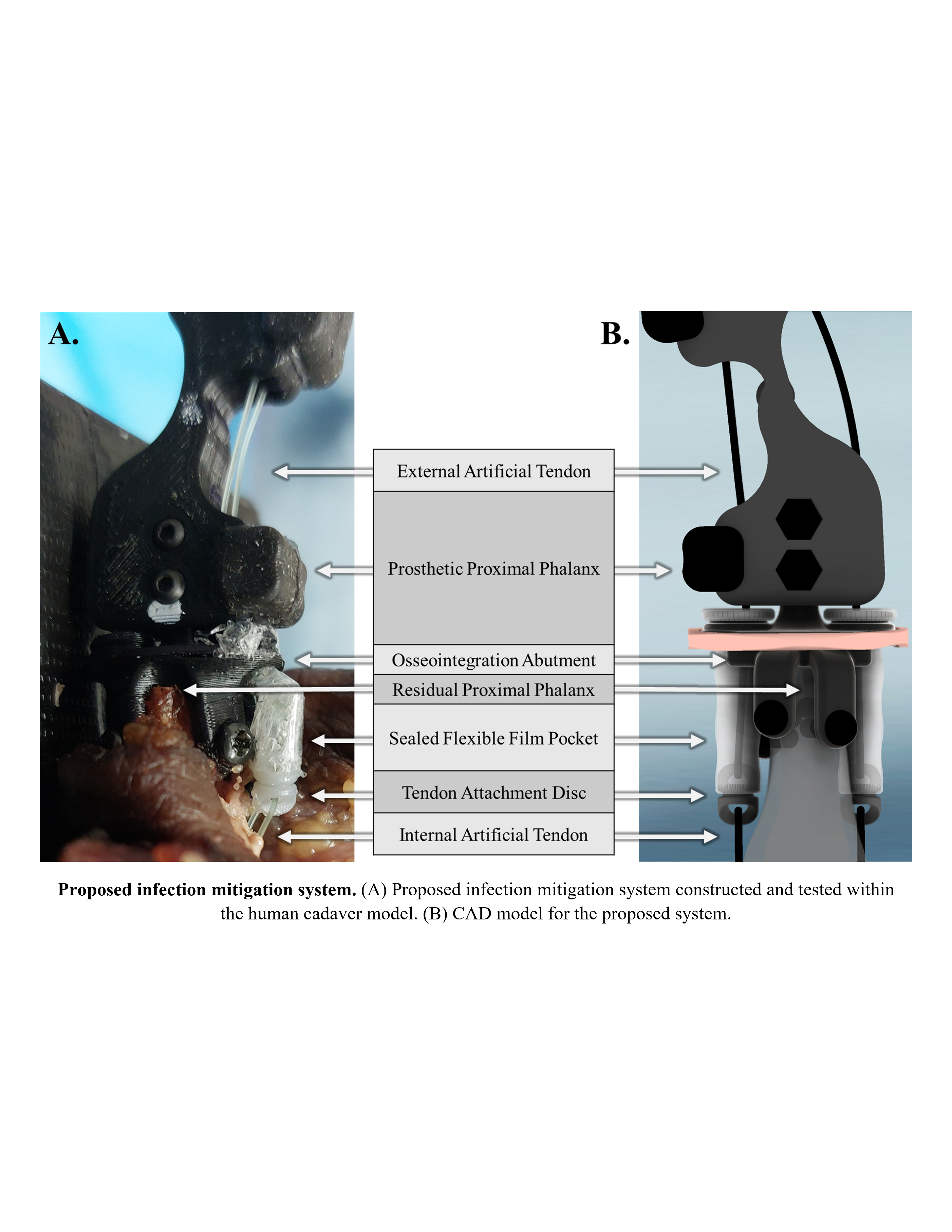
At PSYONIC, I combined my mechanical engineering and bioengineering backgrounds, where my primary focus was to lead a research and development project that aims to create a biointegrated prosthesis that connects to the patient’s residual tendons and bone to provide a battery-free, biomechanically natural way for users to control their prosthesis while preserving inherent proprioception from the residual muscles. The combination of artificial tendon tissue integration and prosthetic bone osseointegration will truly give users the amputated limb they had lost forever. The expected outcome of the proposed project is a partial hand prosthetic device ready for clinical testing that: 1) grants people with partial hand amputations a full range of motion and the ability to perform highly dexterous activities with fine motor control; 2) restoration of proprioception in the device replacing the amputated limb; 3) reduction in prosthesis abandonment. These outcomes have the potential to greatly improve the functionality of prosthetic devices for users of the prosthesis and overall drastically improve their quality of life. My team developed a patent-pending, anatomically accurate (both biomechanically and anthropometrically), osseointegrated, artificial tendon-driven prosthesis. The prosthesis has been created to replace a human finger and has also been adapted for a canine hindlimb. This prosthetic technology will be the first of its kind to enable users to control their prosthesis directly from their muscles, battery-free, with proprioception, and in a biomechanically natural way.
As project lead, I was responsible for all aspects of the project including but not limited to establishing project scopes, applying for grant funding, developing all prosthesis designs, leading all cadaver surgeries and biomechanical testing, creating and conducting all mathematic biomechanical analyses, and managing all team members (engineers, interns, undergraduate, and graduate students). Due to my success and dedication to this project, my supervisor and the CEO of PSYONIC, Dr. Aadeel Akhtar, not only gave me complete autonomy over the artificial tendon project but also expanded my responsibilities to iterate upon PSYONIC’s commercially available, multi-articulating myoelectric hand prosthesis, the AbilityHand.
Included in my portfolio are two writing samples from my most recent grant applications for the project. The first is a submission to an NIH SBIR grant and the second is a submission to a DoD funded grant. I have adapted the writing samples for their intended use in this portfolio by increasing all image sizes, removing all budget justifications and project timelines, and adjusting all formatting to be constant with the portfolio. This sample gives a comprehensive view of my project, its progress, and where we plan to go in the future.
Company:
PSYONIC, Inc.
Position:
Biomechanical Engineer
Role:
Project Lead
Experience Level:
Professional
Project Duration:
2 Years


Valentino Ivan Wilson
Chicago, IL
